|
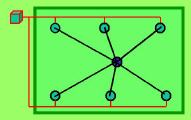
server exploits the measurements delivered from all networked anchor nodes and computes in real-time the measured Euclidean distances to a set of Cartesian coordinates for the moving transponder.
|
|
|
|
|
|
server receives the new measures whenever and wherever set to motion ad the motion is detected: The actual location is determined within short time and delivered to the defined distribution.
|
|
|
|
|
|
server sends the computed location back to the moving node, when required, e.g. to the transportation vehicle.
|
|
|
|
|
|
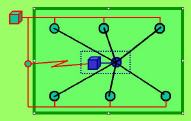
server may be installed as a mobile server on the vehicle which shall be located and which receives data from the anchor transponders.
|
|
|
|
|
|
server is linked to the anchor nodes via wired LAN or WLAN or fibre LAN and requires no synchronisms. The server may be implemented as a virtual server and basically requires neither synchronisms nor timing privileges.
|
|
|
|
|
|
server may be operated independently and timely parallel to further servers, which compute the coordinates of the own location.
|
|
|
|
|
|
virtual server may be implemented as well as a mobile server on a transportation vehicle, that shall be located and which receives data from the anchor transponders.
|
|
|
|
|
|
server may control the measurement of several mobile servers through selected anchor transponders to reduce the time for measurement and transmission.
|
|
|
|